

 联系我们
联系我们

▲RV-E型减速器▲
谐波减速器:
用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者,四者缺一不可。其中,刚轮的齿数略大于柔轮的齿数。谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
▲谐波减速器▲
两者都是少齿差啮合,不同的是谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命都有限。RV通常是用摆线针轮,谐波以前都是用渐开线齿形,现在有部分厂家使用了双圆弧齿形,这种齿形比渐开线先进很多。
减速器的两巨头是Nabtesco和Hamonica Drive,他们几乎垄断了全球的机器人用减速器。这两种减速器都是微米级的加工精度,光这一条在量产阶段可靠性高就很难了,更别说几千转的高速运转,而且还要高寿命。
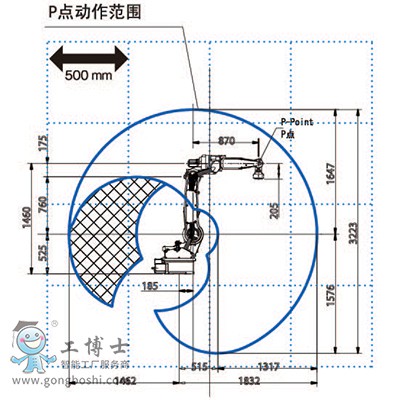
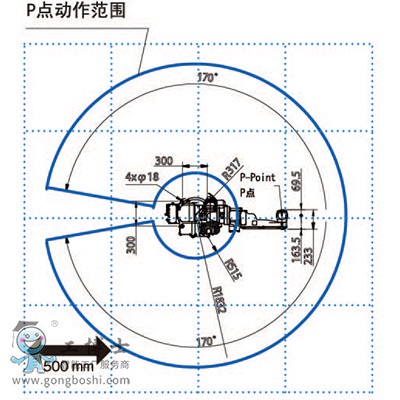
OTC机器人FD-B15 负载 15kg 工作区域 1832mm
操作简便,结构简洁,速度快,机器人的性能得到进一步的提高;
保养简单、维修方便,系统构建的成本低,性能高。
![20150810142933933393[1]](http://www.gongboshi.com/file/upload/202002/15/14/14-57-14-26-28956.jpg)
| 型号 | FD-B15 | |
| 轴数 | 6轴 | |
| 负载 | 15kg | |
| 重复定位精度 | ±0.08mm | |
| 驱动容量 | 5600w | |
| 动作范围 | 基本轴J1 | ±170°(±50°) |
| 基本轴J2 | ﹣155°~﹢100° | |
| 基本轴J3 | ﹣170°~﹢305° | |
| 手臂轴J4 | ±155° | |
| 手臂轴J5 | ﹣37°~﹢217° | |
| 手臂轴J6 | ±205° | |
| *大速度 | 基本轴J1 | 3.40rad/s{195°/s}(2.88rad/s{165°/s}) |
| 基本轴J2 | 3.05rad/s{175°/s} | |
| 基本轴J3 | 3.23rad/s{210°/s} | |
| 基本轴J4 | 6.98rad/s{420°/s} | |
| 基本轴J5 | 6.11rad/s{420°/s} | |
| 基本轴J6 | 10.5rad/s{600°/s} | |
| 荷载能力 | 允许扭矩J4 | 39.0N·m |
| 允许扭矩J5 | 39.0N·m | |
| 允许扭矩J6 | 7.36N·m | |
| 允许惯性矩J4 | 1.05kg·m² | |
| 允许惯性矩J5 | 1.05kg·m² | |
| 允许惯性矩J6 | 0.04kg·m² | |
| 机器人动作范围截面面积 | 6.52m²x340° | |
| 周围温度·湿度 | 0~45℃,20~80%RH(无冷凝) | |
| 本体重量 | 286kg | |
| 第3轴可载能力 | 20kg | |
| 安装方式 | 地面/侧挂/吊装 | |
| 主要应用 | 能应用于激光混合焊、电弧焊、热喷涂、点焊、涂胶、搬运等多种用途, 对应生产加工中各种需求。 |
|
更多产品信息,请点击关注:OTC机器人
图文来源网络,侵删